


 免费会员
免费会员 进入店铺
进入店铺 店铺留言
店铺留言
S7-1200 西门子 6ES7340-1CH02-0AE0 详细参数

FB42 “CONT_S” & FB59 “TCONT_S”
FB42 “CONT_S” 为PI步进控制器,可以用作PI固定设定值控制器;也可以用于级联、混合或比率控制器中的次级控制器,但是不能当做主控制器使用。

图1. FB42 “CONT_S” 方框图
FB59 “TCONT_S” 为步进温度控制器。过程值PV_PER与FB58类似,支持温度信号输入。用于形成偏差的设定值和过程值必须具有相同的单位。
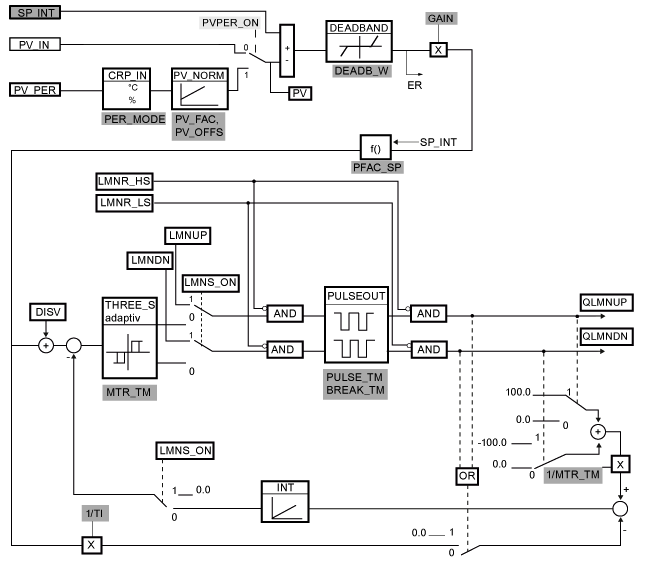
图2. FB59 “TCONT_S” 方框图
主要参数
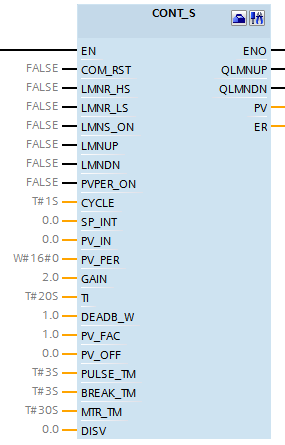
图3. FB42 “CONT_S” 程序块
注:以TIA Potal V13 SP1为例,该功能块在 STEP 7中的管脚与其相同
表1.FB42 “CONT_S” 的输入参数
| 参数 | 变量类型 | 数据类型 | 取值范围 | 默认 | 描述 | 应用 |
|---|---|---|---|---|---|---|
| COM_RST | IN | BOOL | FALSE | 完全重启动 | ||
| LMNR_HS | IN | BOOL |
FALSE |
上限位 |
|
|
| LMNR_LS | IN | BOOL |
FALSE |
下限位 |
|
|
| LMNS_ON | IN | BOOL | TRUE | 手/自动选择 |
LMNS_ON:
0:自动 1:手动 |
|
| LMNUP | IN | BOOL |
FALSE |
QLMNUP手动输出 | ||
| LMNDN | IN | BOOL | FALSE | QLMNDN手动输出 | ||
| PVPER_ON | IN | BOOL | FALSE | 当前值选择 |
PVPER_ON: |
|
| CYCLE | IN | TIME |
CYCLE >= 1ms |
T#1S | 采样时间 | |
| SP_INT | IN | REAL | 0.0 | 设定值 | ||
| PV_IN | IN | REAL | 0.0 | 过程变量输入 |
|
|
| PV_PER | IN | WORD |
W#16#0000 |
外设过程变量输入 | ||
| GAIN | IN | REAL |
2.0 |
比例 | ||
| TI | IN | TIME |
TI >= CYCLE |
T#20s |
积分 | |
| DEADB_W | IN | REAL | 死区 | |||
| PV_FAC | IN | REAL | 1.0 | 过程变量因子 | ||
| PV_OFF | IN | REAL | 0.0 | 过程变量偏移量 | ||
| PULSE_TM | IN | TIME |
PULSE_TM >= CYCLE |
T#3s |
最小脉冲时间 | |
| BREAK_TM | IN | TIME |
BREAK_TM >= CYCLE |
T#3s |
最短中断时间 | |
| MTR_TM | IN | TIME |
MTR_TM >= CYCLE |
T#30s |
周期时间 |
从LMNR_LS运行到LMNR_HS的时间 |
| DISV | IN |
REAL |
0.0 | 干扰变量 |
表2. FB42 “CONT_S” 的输出参数
| 参数 | 变量类型 | 数据类型 | 取值范围 | 默认 | 描述 | 说明 |
|---|---|---|---|---|---|---|
|
QLMNUP |
OUT | BOOL | FALSE | 正向脉冲 | ||
|
QLMNDN |
OUT | BOOL | FALSE | 负向脉冲 | ||
|
PV |
OUT |
REAL |
0.0 | 当前值输出 | ||
| ER | OUT |
REAL |
0.0 | 偏差 |
表3. FB42 “CONT_S” 的静态变量
| 参数 | 变量类型 | 数据类型 | 取值范围 | 默认 | 描述 | 说明 |
|---|---|---|---|---|---|---|
|
LMNRS_ON |
STATS | BOOL | FALSE | 虚拟位置反馈输出开关 | 一个脉冲周期内的脉冲个数,倒数计数 | |
|
LMNRSVAL |
STATS | REAL | 0 | 虚拟位置反馈输出量程 | 0~100% | |
|
LMNR_SIM |
STATS | REAL | 0.0 |
虚拟位置反馈输出 |
||
| stImpDauer | STATS | TIME | T#0MS | 最小脉冲时间当前值 | ||
| stImpDauer | STATS | TIME | T#0MS | 最短中断时间当前值 |
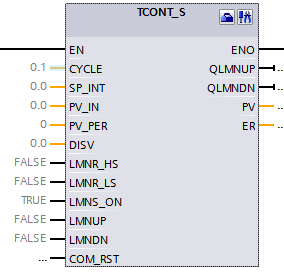
图4. FB59 “TCONT_S” 程序块
注:以TIA Potal V13 SP1为例,该功能块在 STEP 7中的管脚与其相同
表4. FB59 “TCONT_S” 的输入参数
| 参数 | 变量类型 | 数据类型 | 取值范围 | 默认 | 描述 | 应用 |
|---|---|---|---|---|---|---|
| CYCLE | IN | TIME |
CYCLE >= 1ms |
T#1S | 采样时间 | |
| SP_INT | IN | REAL | 0.0 | 设定值 | ||
| PV_IN | IN | REAL | 0.0 | 过程变量输入 |
|
|
| PV_PER | IN | INT |
0 |
外设过程变量输入 | ||
| DISV | IN |
REAL |
0.0 | 干扰变量 | ||
| LMNR_HS | IN | BOOL |
FALSE |
上限位 |
|
|
| LMNR_LS | IN | BOOL |
FALSE |
下限位 |
|
|
| LMNS_ON | IN | BOOL | TRUE | 手/自动选择 |
LMNS_ON:
0:自动 1:手动 |
|
| LMNUP | IN | BOOL |
FALSE |
QLMNUP手动输出 | ||
| LMNDN | IN | BOOL | FALSE | QLMNDN手动输出 | ||
| COM_RST | IN | BOOL | FALSE | 完全重启动 |
表5. FB59 “TCONT_S” 的输出参数
| 参数 | 变量类型 | 数据类型 | 取值范围 | 默认 | 描述 | 说明 |
|---|---|---|---|---|---|---|
|
QLMNUP |
OUT | BOOL | FALSE | 正向脉冲 | ||
|
QLMNDN |
OUT | BOOL | FALSE | 负向脉冲 | ||
|
PV |
OUT |
REAL |
0.0 | 当前值输出 | ||
| ER | OUT |
REAL |
0.0 | 偏差 |
表6. FB59 “TCONT_S” 的静态变量
| 参数 | 变量类型 | 数据类型 | 取值范围 | 默认 | 描述 | 应用 |
|---|---|---|---|---|---|---|
| PV_FAC | STATS | REAL | 1.0 | 过程变量因子 | ||
| PV_OFFS | STATS | REAL | 0.0 | 过程变量偏移量 | ||
| DEADB_W | STATS | REAL | 0.0 | 死区 | ||
|
PFAC_SP |
STATS | REAL | 1.0 | 设定值比例因子 | ||
| GAIN | STATS | REAL |
2.0 |
比例 | ||
| TI | STATS | REAL |
TI >= CYCLE |
40.0s |
积分 | |
| MTR_TM | STATS | REAL |
MTR_TM >= CYCLE |
30.0s |
周期时间 |
从LMNR_LS运行到LMNR_HS的时间 |
| PULSE_TM | STATS | REAL |
PULSE_TM >= CYCLE |
0.0s |
最小脉冲时间 | |
| BREAK_TM | STATS | REAL |
BREAK_TM >= CYCLE |
0.0s |
最短中断时间 | |
|
PER_MODE |
STATS | INT | 0 | 输入模式选择 |
可使用此开关输入 I/O 模块的类型。 然后,在 PV 输出中对输入 PV_PER 中的过程值进行如下标定:
PER_MODE = 0:热电偶;PT100/NI100;标准
PER_MODE = 1:PT100/NI100;气候型
PER_MODE = 2:电流/电压 |
|
| PVPER_ON | STATS | BOOL | FALSE | 当前值选择 |
PVPER_ON: |
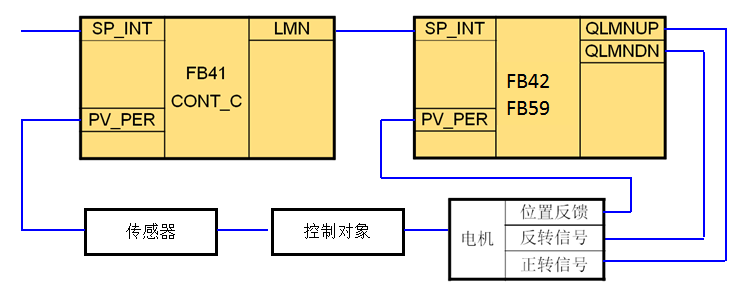
FB42 “CONT_S” 与 FB59 “TCONT_S”的工作模式
单独调节 :根据设定值与当前值的偏差,按照设定好的比例、积分、微分参数进行控制
串级调节:如下图所示
FB58高级功能
FB58 “TCONT_CP“与FB41“CONT_C”相比增加了如表1.所示的功能,本文将以表1.为引导,逐一描述
表1. FB58 “TCONT_CP“与FB41“CONT_C”功能对比
| FB41 | FB58 | |
|---|---|---|
|
过程I/O处理 |
√ |
增加PER_MODE |
|
设定值弱化 |
- | √ |
|
积分保持 |
√ | 增加正/反向保持 |
|
控制带 |
- | √ |
| 自整定 | - | √ |
|
参数装载/保存/重载 |
- | √ |
| PWM | - | √ |
| 无扰切换 | 手动→自动 | √ |
注:过程I/O已经在前面的文档里描述,故不再重复
设定值弱化PFAC_SP
PFAC_SP=1.0 设定值发生变化,比例作用发挥全部作用;
PFAC_SP=0.0 设定值发生变化,比例作用不发挥任何作用。
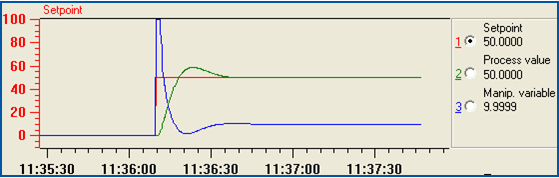
图1. FB58 “TCONT_CP“: PFAC_SP=1.0
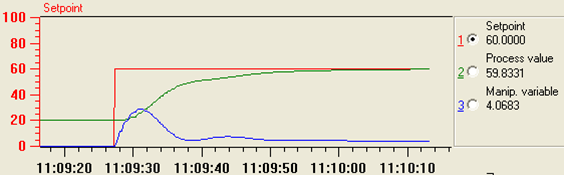
图2. FB58 “TCONT_CP“: PFAC_SP=0.0
积分保持
FB58 “TCONT_CP“积分保持增加了正/反向积分保持功能
正向积分保持:ER>0,积分作用冻结
反向积分保持:ER<0,积分作用冻结
表2.积分保持
|
INT_HPOS |
INT_HNEG |
|
|---|---|---|
| 正向保持 | 1 | 0 |
| 反向保持 | 0 | 1 |
| 积分保持 | 1 | 1 |
下图由WINCC截取各个积分保持的曲线:
黑色(SP):设定值
红色(PV):当前值
蓝色(OUT):PID输出
粉色(I):积分分量
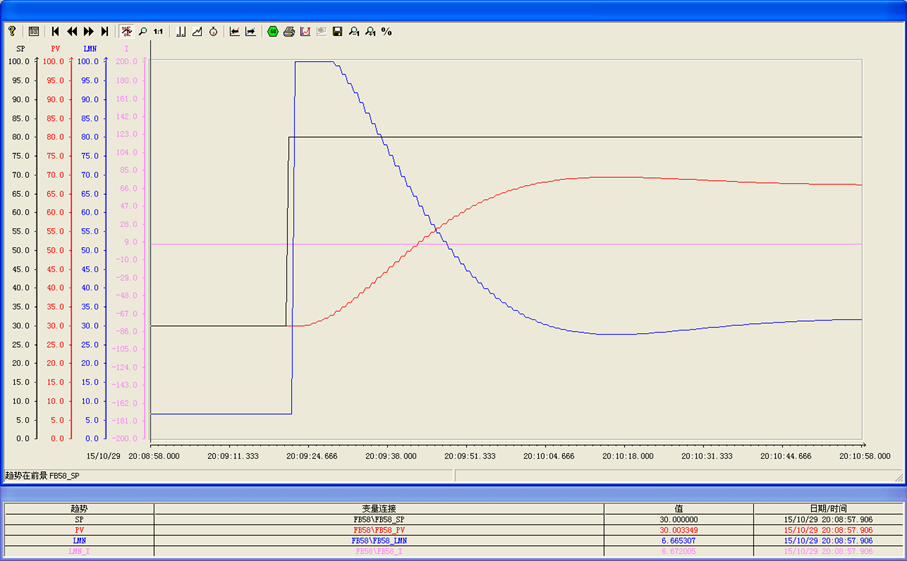
图3.正向积分保持

图4. 反向积分保持
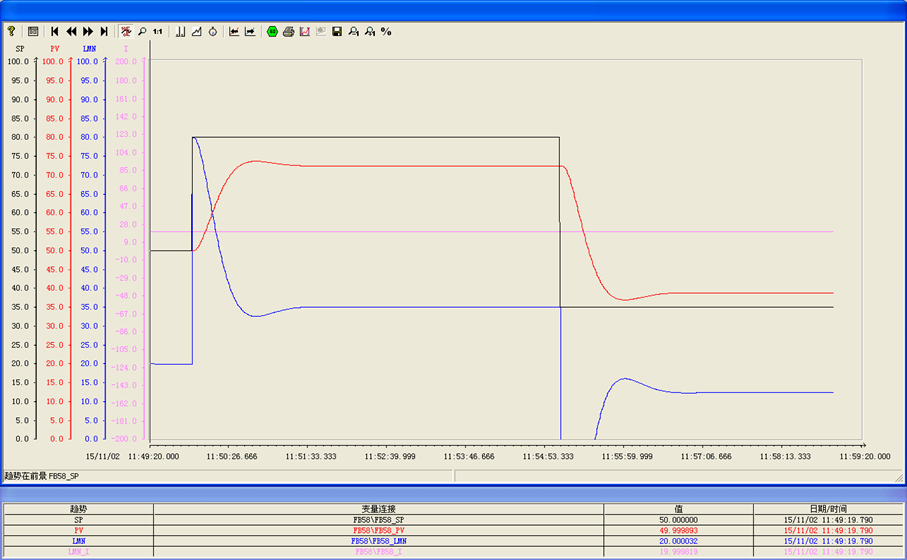
图5.积分保持
控制带CON_ZONE
温度控制回路是一个有明显滞后特性的对象,这给实际的调节过程带来了很多的问题,最显著的困难就是在过程值偏离设定值较大时,调节过程过于缓慢,而在接近设定值时容易出现较大的超调。
从上述的两个问题出发,PID应该满足这样的功能:
1,在偏差超过一定的范围时,PID输出最大或者最小的调节量,让温度值快速回到一个小的范围中,以缩短回路的调节时间;
2,在设定值附近时,越靠近调节量变化越小,以防止超调。
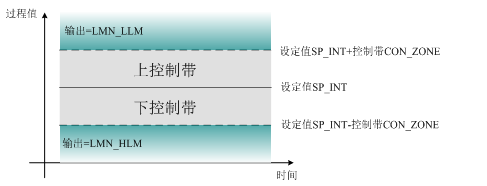
图6,控制带
由上图可见:
1,PV>SP_INT+CONE_ZONE; LMN=LMN_LLM
2,PV<SP_INT+CONE_ZONE; LMN=LMN_HLM
3,.SP_INT-CON_ZONE < PV < SP_INT+CON_ZONE; LMN=LMN_sum
下图由WINCC截取死区的控制曲线:
黑色(SP):设定值
红色(PV):当前值
蓝色(OUT):PID输出
粉色(I):积分分量
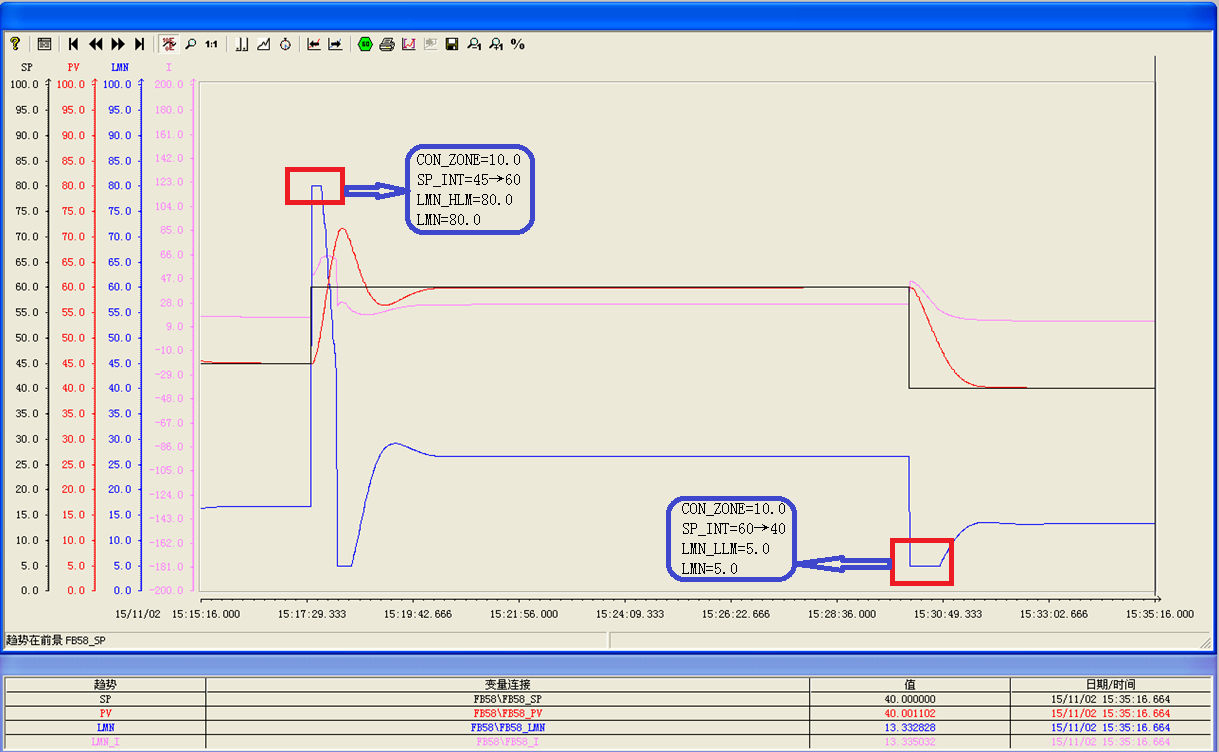
图7. 控制带控制方式
自整定
FB58 “TCONT_CP“功能块自带自整定功能。
自整定有如下几种整定方式:
1,使用设定值阶跃变化,通过逼近工作点来实现整定;
2,通过设置一个起始位,在工作点上进行整定;
注: 以上两种方式均可在控制面板或程序内实现。
自整定可整定如下参数:
1,PFAC_SP;
2,比例参数GAIN;
3,积分时间TI;
4,微分时间TD;(仅PID参数整定)
5,微分因子D_F;
6,控制带开/关CONZ_ON=1;(仅PID参数整定)
7,控制带宽度CON_ZONE;(仅PID参数整定)
通过控制面板自整定
如下图示所,通过面板做自整定:
注: 以STEP 7 V5.5为例

图8. 自整定控制面板
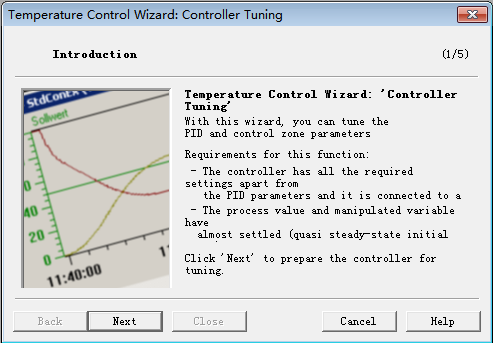
图9. 自整定介绍. 单击Next,下一步
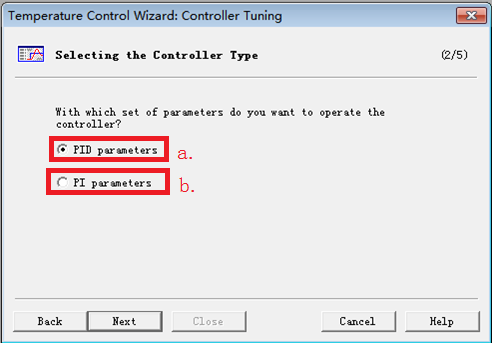
图10 .整定控制器参数选择 . 单击Next,下一步
a. PID参数整定,包含控制带及微分参数;
b.PI参数整定 ,不包含控制带及微分参数.

图11. 自整定激励方式 . 单击Next,下一步
a. 使用设定值阶跃变化,通过逼近工作点来实现整定;
b. 通过设置一个起始位,在工作点上进行整定.
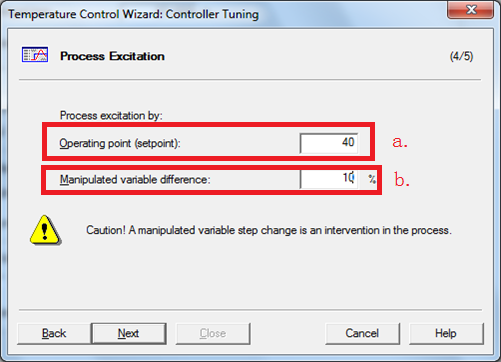
图12. 过程激励. 单击Next,下一步
a. 设定值
1,当在上一步选择"Tune at the operating point by setting a start bit", 无法修改;
2,当在上一步选择"Tune by approaching the operating point with a setpoint step change",可修改设定值阶跃值.
b,输出值阶跃(TUN_DLMN):
当进行整定后进入PHASE 2,LMN=LMN0+TUN_DLMN (为阶跃值).

图13. 自整定结果
a,整定结果
b,控制器类型
通过程序块自整定
同样也可以通过程序块进行自整定,步骤如下:
1.设置TUN_ON=TURE,准备整定控制器。控制器从阶段0切换到阶段1。
2.在阶段1中等待一段时间后,在SP_INT参数设置一个设定值阶跃变化,或者设置TUN_ST=TURE。控制器输出一个由数值TUN_DLMN改变了的可调节变量,然后开始搜索拐点。
设定值阶跃自整定方式
由WINCC截图可看设定值阶跃自整定:
设定值(SP):红色
反 馈 (PV):绿色
输 出 (LMN):深蓝色
自整定整定阶段(PHASE):浅蓝色
自整定启动(TUN_ON):紫色
整定结果(STAUTS_H):黄色

图14. 设定值阶跃自整定方式
工作点自整定方式
由WINCC截图可看设定值阶跃自整定:
设定值(SP):红色
反 馈 (PV):绿色
输 出 (LMN):深蓝色
自整定整定阶段(PHASE):浅蓝色
自整定启动(TUN_ON):紫色
整定结果(STAUTS_H):黄色

图15. 工作点自整定方式
自整定过程PHASE
由以上两图可知,当激活自整定后,主要有4个阶段:
PHASE 1:TUN_ON=TRUE,进入PHASE 1 LMN当前值写入.DBD220(LMN0);
PHASE 2:由SP_INT的阶跃变化或TUN_ST触发整定,进入PHASE 2,搜索拐点LMN=LMN0+TUN_DLMN;
PHASE 3~5:参数整定,当PV值超过了SP值阶跃变化的75%,整定结束。始终以自动方式启动,并且LMN=LMN0+0.75*TUN_DLMN(即使整定前处于手动模式)
PHASE 7:检查过程类型
注意事项:
1,设定值阶跃和TUN_DLMN必须合适匹配,如果TUN_DLMN太高,设定值阶跃变化的75%范围内找不到拐点;
2,TUN_DLMN必须足够高,以便过程变量可以至少达到设定值阶跃变化的22%,否则可能会一直停留在PHASE 2。
自整定出错状态和纠正方法
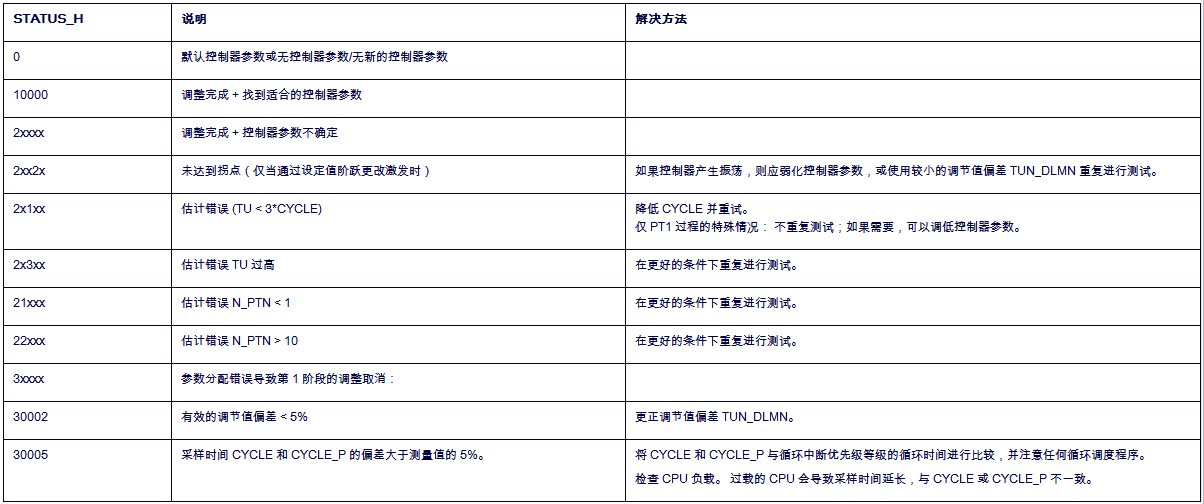
图16. 自整定常见问题
注意:
1,同时置位TUN_ON和TUN_ST,系统始终处于PHASE1,无法启动自整定;
2,当有效的TUN_DLMN<5%时(阶段1结束),STATUS_H=30002,整定被终止;
3,采样时间CYCLE和CYCLE_P之间的差值超过了5%, STATUS_H=30005,整定被终止。
FB58(TCONT_CP)
功 能:FB58 “TCONT_CP“ 针对温度控制过程而设计(也可应用于其他控制过程),可实现连续调节及比例调节元件的两级调节。
输出类型:模拟量输出或PWM输出可选。
应用领域:特别适用于温度控制过程,可选 PI 或 PID 控制方式。适用于带自整定功能的回路。
特 点:具备温度信号转换的功能,带自整定功能,同时具备模拟量输出和PWM输出方式,两步控制方式,比例作用可弱化,控制带功能。

图1.FB58"TCONT_CP" 的方框图
主要参数
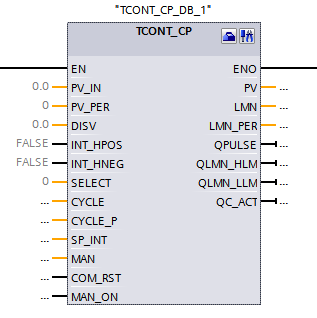
图2. FB58"TCONT_CP"程序块
注:以TIA Portal V13 SP1为例,该功能块在STEP 7中的管脚与其相同
表1. FB58"TCONT_CP" 的输入参数
| 参数 | 变量类型 | 数据类型 | 取值范围 | 默认 | 描述 | 应用 |
|---|---|---|---|---|---|---|
| PV_IN | IN | REAL | -100~100(%)或者 物理值 | 0.0 | 过程变量输入 |
必须与SP_INT单位一致
|
| PV_PER | IN | INT | 0 | 外设过程变量输入 |
PIW xxx |
|
| DISV | IN | REAL | -100~100(%) | 0.0 | 干扰变量 |
|
| INT_HPOS | IN | BOOL | FLASE | 积分作用的输出可在正向保持 |
必须与SP_INT单位一致
|
|
| INT_HNEG | IN | BOOL | FLASE | 积分作用的输出可在负向保持 | ||
| SELECT | IN | INT | 0 | 模式选择 |
如果脉冲整形器开启,则有几种方法可以调用 PID 算法和脉冲整形器:
SELECT = 0:以快速循环中断优先级等级调用控制器,处理 PID 算法和脉冲整形器。 |
表2. FB58"TCONT_CP" 的输入输出参数
| 参数 | 变量类型 | 数据类型 | 取值范围 | 默认 | 描述 | 应用 |
|---|---|---|---|---|---|---|
| CYCLE | IN/OUT | REAL | 0.1(s) | 采样时间 |
|
|
| CYCLE_P | IN/OUT | REAL |
0.02(s) |
脉冲整形器作用的采样时间 | ||
| SP_INT | IN/OUT | REAL | 0.0 |
设定值 |
||
| MAN | IN/OUT | REAL | 0.0 | 手动控制值 |
|
|
| COM_RST | IN/OUT | BOOL | 0.0 | 完全重启动 |
置位后自动复位
|
|
| MAN_ON | IN/OUT | BOOL | TRUE | 手/自动切换按钮 |
MAN_ON:
0:自动 1:手动 |
表3. FB58"TCONT_CP"的输出参数
| 参数 | 变量类型 | 数据类型 | 取值范围 | 默认 | 描述 | 说明 |
|---|---|---|---|---|---|---|
| LMN | OUT | REAL | 0.0 | 调节值 | ||
| LMN_PER | OUT | INT | 0 | 外设调节值 |
PQW xxx
|
|
| QLMN_HLM | OUT | BOOL | FALSE | 调节值上限报警 |
|
|
| QLMN_LLM | OUT | BOOL | FALSE | 调节值下限报警 |
|
|
| LMN_P | OUT | REAL | 0.0 | 比例分量 |
|
|
| LMN_I | OUT | REAL | 0.0 | 积分分量 |
|
|
| LMN_D | OUT | REAL | 0.0 | 微分分量 |
|
|
| PV | OUT | REAL | 0.0 | 当前值输出 |
|
|
| QPLUSE | OUT | BOOL | FLASE | 脉冲输出 | ||
| QC_ACT | OUT | BOOL | FLASE | 连续控制指示 |
此参数指示是否在下一次调用块时处理连续控制组件(仅当 SELECT 的值为 0 或为 1 时才相关) |
表4. FB58"TCONT_CP"的常用静态参数
| 参数 | 偏移量 | 数据类型 | 取值范围 | 默认 | 描述 | 说明 |
|---|---|---|---|---|---|---|
| DEAD_W | 44.0 | REAL | 0.0 | 死区 | ||
| I_ITLVAL | 48.0 | REAL | -100~100(%) | 0.0 | 积分初始值 | |
| LMN_HLM | 52.0 | REAL | FALSE | 输出值上限 | ||
| LMN_LLM | 56.0 | REAL | FALSE | 输出值下限 | ||
| PER_TM | 76.0 | REAL | 0.0 | 周期时间 |
脉冲调制的周期时间
|
|
| P_B_TM | 80.0 | REAL | 0.0 | 最小脉冲/中断时间 |
防止阀门频繁开关
|
|
| TUN_DLMN | 84.0 | REAL | -100~100(%) | 0.0 | 阶跃值 |
控制器调节的过程激发是由 TUN_DLMN 中的输出值阶跃变化引起的。 |
| PER_MODE | 88.0 | INT | 0 | 输入值模式选择 |
可使用此开关输入 I/O 模块的类型。 然后,在 PV 输出中对输入 PV_PER 中的过程值进行如下标定:
PER_MODE = 0:热电偶;PT100/NI100;标准
PER_MODE = 1:PT100/NI100;气候型
PER_MODE = 2:电流/电压 |
|
| PVPER_ON | 90.0 | BOOL | FLASE | 当前值选择外设 |
PVPER_ON: |
|
| I_ITL_ON | 90.1 | BOOL | FLASE | 积分设定值 |
I_ITL_ON: |
|
| PULSE_ON | 90.2 | BOOL | FLASE | 激活脉冲功能 | ||
| ER | 92.0 | REAL | 0.0 | 偏差 |
ER=SP_INT-PV_IN
|
|
| LMN_P | 96.0 | REAL | 0.0 | 比例分量 | ||
| LMN_I | 100.0 | REAL | 0.0 | 积分分量 | ||
| LMN_D | 104.0 | REAL | 0.0 | 微分分量 | ||
| PHASE | 108.0 | INT | 0 | 自整定阶段 |
在输出 PHASE 中指示控制器调节的当前阶段。
PHASE = 0:无调节模式;自动模式或手动模式 |
|
| STATUS_H | 110.0 | INT | 0 | 整定状态字 | ||
| STATUS_D | 112.0 | INT | 0 | 被控对象类型 |
一阶、二阶等被控对象
|
|
| PI_CON | 116.0 | STRUCT |
PI 控制器
|
|||
| GAIN | +0.0 | REAL | 0.0 | 比例参数 | ||
| TI | +4.0 | REAL | (s) | 0.0 | 积分参数 | |
| PID_CON | 124.0 | STRUCT |
PID 控制器
|
|||
| GAIN | +0.0 | REAL | 0.0 | 比例参数 | ||
| TI | +4.0 | REAL | (s) | 0.0 | 积分参数 | |
| TD | +8.0 | REAL | (s) | 0.0 | 微分参数 | |
| PAR_SAVE | 136.0 | STRUCT |
PID 参数存储
|
|||
| PFAC_SP | +0.0 | REAL | 0.0 | 设定值比例因子 | ||
| GAIN | +4.0 | REAL | 0.0 | 比例参数 | ||
| TI | +8.0 | REAL | (s) | 0.0 | 积分参数 | |
| TD | +12.0 | REAL | (s) | 0.0 | 微分参数 | |
| D_F | +16.0 | REAL | 5.0~10.0 | 5.0 | 微分因子 | |
| CON_ZONE | +20.0 | REAL | 0.0 | 控制带 | ||
| CONC_ON | +24.0 | BOOL | FLASE | 控制带使能 | ||
| PFAC_SP | 162.0 | REAL | 0.0 | 设定值比例因子 | ||
| GAIN | 166.0 | REAL | 0.0 | 比例参数 | ||
| TI | 170.0 | REAL | (s) | 0.0 | 积分参数 | |
| TD | 174.0 | REAL | (s) | 0.0 | 微分参数 | |
| D_F | 178.0 | REAL | 5.0~10.0 | 5.0 | 微分因子 | |
| CON_ZONE | 182.0 | REAL | 0.0 | 控制带 | ||
| CONC_ON | 186.0 | BOOL | FLASE | 控制带使能 | ||
| TUN_ON | 186.1 | BOOL | FLASE | 启动自整定 |
|
|
| TUN_ST | 186.2 | BOOL | FLASE | 激活激励 |
如果在控制器调节期间操作点的设定值保持恒定,则 TUN_ST=1 将激活输出值阶跃变化(变化量为 TUN_DLMN)。 |
|
|
UNDO_PAR |
186.3 | BOOL | FLASE | 加载参数 |
从数据结构 PAR_SAVE 加载控制器参数 PFAC_SP、GAIN、TI、TD、D_FCONZ_ON 和 CON_ZONE (仅在手动模式下有效)。 |
|
|
SAVE_PAR |
186.4 | BOOL | FLASE | 保存参数 |
在数据结构 PAR_SAVE 中保存控制器参数 PFAC_SP、GAIN、TI、TD、D_F、CONZ_ON 和 CON_ZONE。 |
|
|
LOAD_PID |
186.5 | BOOL | FLASE | 加载参数 |
根据 PID_ON,从数据结构 PI_CON 或 PID_CON 加载控制器参数 GAIN、TI,TD(仅在手动模式下有效) |
|
|
PID_ON |
186.6 | BOOL | FLASE | 模式选择 |
在输入 PID_ON 中,可以指定已调整的控制器作为 PI 控制器还是作为 PID 控制器运行。
PID 控制器: PID_ON = TRUE 但是,对于某些过程类型,尽管 PID_ON = TRUE,仍然只能设计 PI 控制器。 |
|
手/自动选择(MAN_ON)
表5.MAN_ON的选择
| 参数 | 状态 | 说明 |
|---|---|---|
| MAN_ON | 0 |
自动控制:PID经过程序块计算输出
|
| MAN_ON | 1 |
手动控制:直接由MAN控制输出
|
当前值PV_IN与PV_PER的选择
表6.PVPER_ON的选择
| 参数 | 状态 | 说明 |
|---|---|---|
| PVPER_ON | 0 |
PV_IN有效
|
| PVPER_ON | 1 |
PV_PER有效
|
注:无论当前值选择哪个管脚,SP_INT必须与其量纲相同
当选择PV_IN作为反馈值时, FB58"TCONT_CP"与FB41"CONT_C"的用法一样
PVPER_ON=1时,PER_MODE模式选择
表7.PID参数设定
| 参数 | 描述 | 公式 |
|---|---|---|
| PER_MODE=0 | 热电偶或热电阻标准型 |
PV_PER*0.1 |
| PER_MODE=1 | 热电阻气候型 |
PV_PER*0.01 |
| PER_MODE=2 | 电流/电压转换 | PV_PER * 100/27648 |
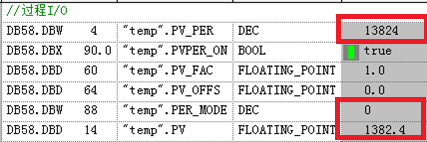
图3. PER_MODE=0

图4. PER_MODE=1

图5. PER_MODE=2
PID输出LMN与LMN_PER选择
FB58"TCONT_CP"与FB41"CONT_C"的用法一样,参考之前的文档: FB41基本使用
S7-1200 西门子 6ES7340-1CH02-0AE0
- 公司类型私营有限责任公司
- 经营模式经销商-私营有限责任公司
- 联系人姚善雷
- 联系手机13874941405
- 联系固话0731-526565255
- 公司地址湖南省长沙市岳麓区天顶街道雷锋大道金科世界城468号
-
 防爆制动器/防爆推动器就选焦作精控--精准控制 ¥1000.00
防爆制动器/防爆推动器就选焦作精控--精准控制 ¥1000.00 -
 智能玻璃钢井房 厂家直销 ¥80.00
智能玻璃钢井房 厂家直销 ¥80.00 -
 AB 配件 20-750-ENETR ¥444.00
AB 配件 20-750-ENETR ¥444.00 -
 AB 触摸屏 2711-K5A8 ¥333.00
AB 触摸屏 2711-K5A8 ¥333.00 -
VM5000KDIA0.14CU电流互感器 ¥444.00
-
霍尼韦尔模块:05701-A-0283 ¥222.00
-
6GK5788-1GD00-0AA0西门子交换机 ¥222.00
-
 特价供应DANOTHERM F2 ZH3213140508,CBH 215 C H 508 4R0 ¥5999.00
特价供应DANOTHERM F2 ZH3213140508,CBH 215 C H 508 4R0 ¥5999.00 -
 生产供应各种型号离合器 ¥100.00
生产供应各种型号离合器 ¥100.00 -
 ONOSOKKI小野测器内置放大器型加速度传感器NP-3310 ¥1.00
ONOSOKKI小野测器内置放大器型加速度传感器NP-3310 ¥1.00 -
 涟恒EVB高精密系列行星斜齿轮减速机 ¥990.00
涟恒EVB高精密系列行星斜齿轮减速机 ¥990.00 -
 500kw球磨机起动 高压电机软启动柜 一体化高压固态软启动柜 ¥79000.00
500kw球磨机起动 高压电机软启动柜 一体化高压固态软启动柜 ¥79000.00 -
 EP-520C 分体式液压机 (日本 Izumi) ¥100.00
EP-520C 分体式液压机 (日本 Izumi) ¥100.00 -
 UP-45SVG-4 电动液压泵(日本 NITTOH) ¥100.00
UP-45SVG-4 电动液压泵(日本 NITTOH) ¥100.00 -
 PCW3000-Li 便携式电动绞磨机(加拿大) ¥100.00
PCW3000-Li 便携式电动绞磨机(加拿大) ¥100.00



